

1)除了把tcp作準(或者用數(shù)模導入),是否還有方法提高軌跡精度?
2)現(xiàn)場有切割等工藝,對軌跡精度要求較高,如果機器人軌跡出現(xiàn)鋸齒等抖動造成的現(xiàn)象,如何處理?
3)ABB機器人提供了四種運動模式供選擇,也可自定義。

運動進程模式由一套特定的機器人微調(diào)參數(shù)組成。每套微調(diào)參數(shù)(也就是每種模式)都會針對特定的應用等級來優(yōu)化機器人的微調(diào)。
預定義了下列模式:
· Optimal cycle time mode – 此模式產(chǎn)生可能的*短循環(huán)時間,通常是默認模式。· Accuracy mode – 此模式提高了路徑準確度。相較Optimal cycle time mode,循環(huán)時間將稍稍增加。這是提高小型和中型機器人(比如,IRB 2400和IRB 2600)路徑準確度的建議選項。
· Low speed accuracy mode – 此模式提高了路徑準確度。相較Accuracy mode,循環(huán)時間將稍稍增加。這是提高大型機器人(比如,IRB 4600)路徑準確度的建議選項。
· Low speed stiff mode-建議在*大伺服器剛性具有重要意義的接觸應用中使用該模式。此外也可用于某些想盡量減少路徑波動的低速應用。該模式的周期時間要久于Low speed accuracy mode。
4)如何修改motionprocess mode?
5)示教器-控制面板-配置,主題選擇motion,找到robot

6)找到Use MotionProcess Mode,選擇對應模式
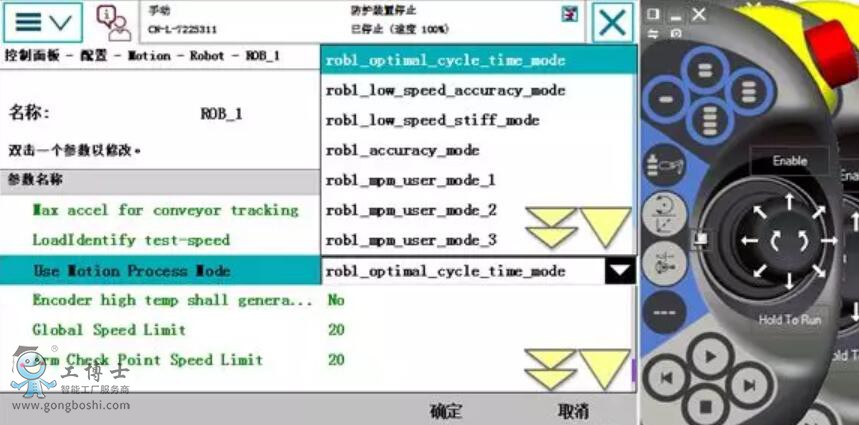
7)也可在Motion Process Mode里根據(jù)手冊修改對應參數(shù),提高軌跡精度,降低抖動
了解更多咨詢:庫卡機器人配件